Normalmente se incorporan en sistemas de navegación inercial para que por medio de las mediciones de sus sensores y utilizando algoritmos matemáticos se pueda estimar la posición de aeronaves y vehículos submarinos no tripulados, satélites, etc.
En automóviles la IMU provee información sobre el estado del movimiento del vehículo, verifica que las señales de aceleración longitudinal, lateral y vertical sean trasmitidas a los dispositivos de control para aplicaciones de confort y desempeño del vehículo.
Otras aplicaciones también son su integración en dispositivos electrónicos de consumo como celulares, tablets, relojes inteligentes e incluso en sistemas de alertamiento sísmico.
El objetivo principal de este proyecto es desarrollar una metodología utilizando un excitador de seis grados de libertad para caracterización de sensores de medición inerciales (Acelerómetros y giroscopios).
- Utilizar el robot hexápodo instrumentado para validar o calibrar acelerómetros en bajas frecuencias (0.5 Hz a 6 Hz) en aceleraciones menores a 10 m/s2.
- Definir una metodología para caracterizar sensores digitales como acelerómetros y giroscopios, determinando la sensibilidad digital de los mismos y haciendo la comparación relativa con los acelerómetros y sensores de velocidad angular analógicos.
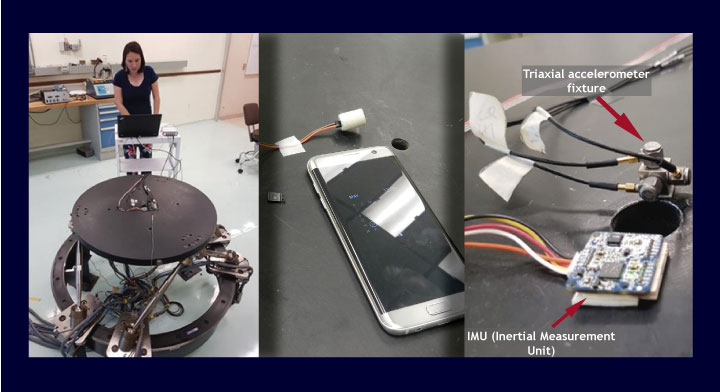
El robot Hexápodo es un robot de tipo paralelo, el cual posee 6 grados de libertad, tres movimientos axiales en los ejes “x”, “y” y “z”, así como rotaciones en balanceo, inclinación y guiñada. Se programan rutinas de movimiento que el robot reproduce en la plataforma donde se colocan los sensores:
- La unidad de medición inercial (digital)
- El sensor de referencia analógico (piezo-eléctricos).
Los datos recibidos son procesados y comparados para determinar la sensibilidad digital a través de los resultados obtenidos del sensor de referencia.
Este tipo de metodologías ayudan a tener mayor certeza de los resultados de las IMU, lo que contribuye a optimizar su desempeño en los diferentes ámbitos en los que se utilizan.
Mayor información:
Aldo Adrián García González
algarcia@cenam.mx
Iris Mariela Lopez Bautista
ilopez@cenam.mx
Dirección de Vibraciones y Acústica