El conocer la posición y orientación de un vehículo en movimiento es el problema central de la navegación. A lo largo de la historia, este problema se ha resuelto de muchas maneras y entre éstas se encuentran el pilotaje y la navegación celestial.
El pilotaje consiste en identificar sitios conocidos referidos a un mapa y con esto determinar nuestra ubicación actual. De la identificación de por lo menos 3 puntos, es posible localizar nuestra posición en el mapa sobre la superficie terrestre. Este es el principio de sistemas como el GPS que se basan en información de posición y tiempo enviados por una constelación de satélites que actúan como puntos de referencia conocidos.
La navegación celeste se basa en el hecho de que en un instante dado, las posiciones observadas de las estrellas son únicas para un punto determinado en la Tierra, por lo que a través de conocer la posición (elevación y azimut) en el cielo de una o más estrellas de referencia en un momento determinado podemos establecer nuestra posición sobre la superficie de la Tierra.
La mayor parte de los sistemas de navegación tienen una característica en común: deben recibir información externa al vehículo para determinar su posición. Esta información puede ser en forma visual o de señales de radio como en el caso de buscar referencias conocidas, recibir señales GPS o nuestras propias señales radar una vez que rebotan en algún obstáculo. En contraste con lo anterior, los sistemas de navegación inercial son auto-contenidos, es decir, no requieren de la detección de señales externas. Se navega a través de detectar el movimiento del vehículo y calcular su cambio de posición a partir de conocer su estado inicial. Este tipo de sistema de navegación puede ser necesario cuando no se tenga acceso o no sea conveniente acceder a señales externas, como podría ser el caso de un submarino o un misil cuyo fuselaje esté sujeto a radiación ionizante.
Navegación inercial
La navegación inercial es una técnica de navegación autónoma que emplea mediciones de acelerómetros y giróscopos, y que permite, a través de cálculos, conocer la velocidad, posición y orientación de una nave a partir de un punto inicial con orientación y velocidad conocidos. Su principio de operación es muy simple: Si medimos la aceleración de un vehículo, podemos integrar la aceleración con respecto al tiempo para obtener la velocidad y luego integrar la velocidad para obtener posición. Por lo tanto, suponiendo que conocemos la posición y la velocidad iniciales, podemos determinar la posición del vehículo en cualquier momento posterior. Por otra parte, a través de los giróscopos podremos conocer el cambio de orientación del vehículo a partir de una orientación inicial.
Lo anterior, que en principio parece muy fácil, requiere de mediciones muy precisas de la aceleración en 3 ejes, la orientación del vehículo y, sobre todo del tiempo, ya que al calcular la velocidad y la aceleración de nuestro vehículo, cualquier error en la estimación de las variables anteriores se va acumulando por el proceso de integración, lo que tiende a hacer que el error se vuelva considerable con el paso del tiempo y resulte necesario ajustar el sistema frecuentemente empleando referencias externas.
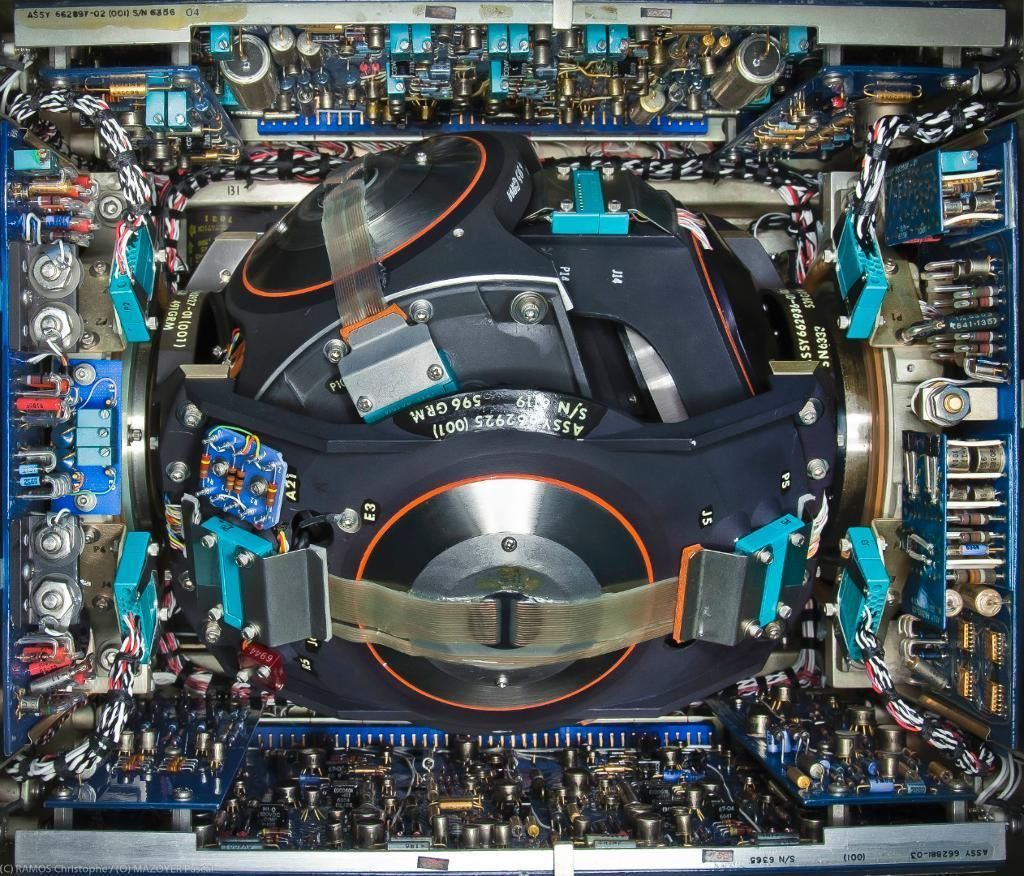
En la Figura 1 se muestra un ejemplo de un sistema de navegación inercial.